
Software - Ligar 1ª vez
VB 2008, porque me irrita o 2010...
Nesta 1ª fase vou apenas disponibilizar o executavel da aplicação. Motivo?! Pois é antes de publicar o codigo fonte tenho de o tornar legivel e apagar o lixo acumulado. Neste momento mais parece uma sebenta suja que um codigo decente, mas funciona. Não é á prova de bugs mas funciona.
Depois de sacar o Zip, depois de o descompactar (o exe e o dll deverão ficar juntos, o dll é um comando que eu criei) e quando o executar pela primeira vez vai aparecer uma mensagem do tipo:

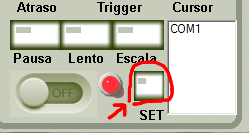
Isto porque o software não sabe qual o porto a usar. O botão de configuração é o da figura abaixo:
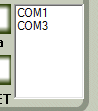
Abrirá ao lado uma janela com os portos série, activos nesse momento. Como se pode ver só aparece na figura o COM1, isto porque propositadamente eu não tenho o Arduino ligado. Se ele estiver ligado nesta altura já lá tera o porto respectivo que deverá seleccionar com duplo click. Senão, ligue-o com o firmware carregado e espere uns segundos para o PC reconhcer o USB e depois click em SET de novo. Se tudo estiver bem, vai aparecer o porto do Arduino. Faça duplo click sobre ele.
Neste momento aparece nova mensagem:
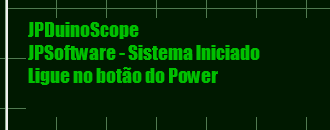
Ok! Neste momento ele criou no C: um pequeno ficheiro chamado "Xiloscopio.ini" cujo conteudo é apenas o nome do porto seleccionado. O que significa que nas proximas vezes que o ligar ele vai directamente para este estado esperando apenas pelo botão de power.
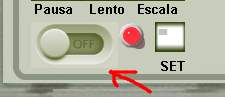

Clicando em cima o sistema fica pronto.